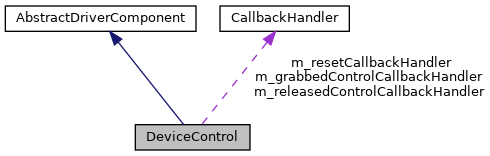
The DeviceControl class Controls the Voyager.
More...
#include <Driver/DriverComponents/DeviceControl.h>
The DeviceControl class Controls the Voyager.
Definition at line 22 of file DeviceControl.h.
◆ DeviceControl()
| DeviceControl::DeviceControl |
( |
pMessageProcessor |
messageProcessor | ) |
|
◆ addGrabbedControlCallback()
| std::shared_ptr< std::function< void()> > DeviceControl::addGrabbedControlCallback |
( |
const std::function< void()> & |
grabbedControlCallback | ) |
|
◆ addReleasedControlCallback()
| std::shared_ptr< std::function< void(void)> > DeviceControl::addReleasedControlCallback |
( |
const std::function< void()> & |
releasedControlCallback | ) |
|
◆ addResetCallback()
| std::shared_ptr< std::function< void()> > DeviceControl::addResetCallback |
( |
const std::function< void()> & |
resetCallback | ) |
|
◆ handleGrabControlRecieved()
| void DeviceControl::handleGrabControlRecieved |
( |
const google::protobuf::Message & |
message | ) |
|
|
protected |
◆ handleReleaseControlRecieved()
| void DeviceControl::handleReleaseControlRecieved |
( |
const google::protobuf::Message & |
message | ) |
|
|
protected |
◆ handleResetRecieved()
| void DeviceControl::handleResetRecieved |
( |
const google::protobuf::Message & |
message | ) |
|
|
protected |
◆ hasControl()
| bool DeviceControl::hasControl |
( |
| ) |
const |
hasControl Checks if the Voyager is being controlled
- Returns
- returns true if the Voyager is being controlled
Definition at line 27 of file DeviceControl.cpp.
◆ releaseControl()
| void DeviceControl::releaseControl |
( |
| ) |
|
releaseControl Takes Voyager out of DAQ mode and releases control butthole of the device
Definition at line 22 of file DeviceControl.cpp.
◆ removeGrabbedControlCallback()
| bool DeviceControl::removeGrabbedControlCallback |
( |
std::shared_ptr< std::function< void(void)>> |
callback | ) |
|
◆ removeReleasedControlCallback()
| bool DeviceControl::removeReleasedControlCallback |
( |
std::shared_ptr< std::function< void(void)>> |
callback | ) |
|
◆ removeResetCallback()
| bool DeviceControl::removeResetCallback |
( |
std::shared_ptr< std::function< void(void)>> |
callback | ) |
|
◆ reset()
| void DeviceControl::reset |
( |
| ) |
|
|
virtual |
◆ takeControl()
| void DeviceControl::takeControl |
( |
| ) |
|
takeControl Puts Voyager in DAQ mode and take control of the device
Definition at line 17 of file DeviceControl.cpp.
◆ m_grabbedControlCallbackHandler
◆ m_hasControl
| std::atomic_bool DeviceControl::m_hasControl |
|
private |
◆ m_releasedControlCallbackHandler
◆ m_resetCallbackHandler
 Public Member Functions inherited from AbstractDriverComponent
Public Member Functions inherited from AbstractDriverComponent 1.8.17
1.8.17